Hello
I am speaking in translation because I am not good at English.
I loaded the STL file from the Minie library using HelloMadMallet.java
at Minie/HelloMadMallet.java at 14d4f6af68c439e3413adc6ea27f3f90919d26ab · stephengold/Minie · GitHub
and wrote a test code where the object fell from top to bottom.
But it took 12 seconds to shape the collision of the object.
This object has a small file size of 1.6 MB. Can you tell me why?
It’s the code I wrote.
package jme3utilities.tutorial;
import com.jme3.app.SimpleApplication;
import com.jme3.asset.plugins.ClasspathLocator;
import com.jme3.asset.plugins.FileLocator;
import com.jme3.bullet.BulletAppState;
import com.jme3.bullet.PhysicsSpace;
import com.jme3.bullet.collision.shapes.CollisionShape;
import com.jme3.bullet.collision.shapes.CompoundCollisionShape;
import com.jme3.bullet.collision.shapes.CylinderCollisionShape;
import com.jme3.bullet.collision.shapes.HullCollisionShape;
import com.jme3.bullet.control.RigidBodyControl;
import com.jme3.bullet.objects.PhysicsBody;
import com.jme3.bullet.objects.PhysicsRigidBody;
import com.jme3.material.Material;
import com.jme3.math.Vector3f;
import com.jme3.scene.Geometry;
import jme3utilities.stl.STLLoader;
public class HelloMadMallet extends SimpleApplication {
private PhysicsSpace physicsSpace;
BulletAppState _bulletAppState;
public static void main(String[] arguments) {
HelloMadMallet application = new HelloMadMallet();
application.start();
}
/**
* Initialize this application.
*/
@Override
public void simpleInitApp() {
// Set up Bullet physics and create a physics space.
_bulletAppState = new BulletAppState();
_bulletAppState.setDebugEnabled(true);
stateManager.attach(_bulletAppState);
physicsSpace = _bulletAppState.getPhysicsSpace();
physicsSpace.setGravity(new Vector3f(0f, -50f, 0f));
// Visualize the local axes of each collision object.
_bulletAppState.setDebugAxisLength(1f);
meshLoad();
// Create a static disc and add it to the space.
float discRadius = 5f;
float discThickness = 0.5f;
CollisionShape discShape = new CylinderCollisionShape(discRadius,
discThickness, PhysicsSpace.AXIS_Y);
PhysicsRigidBody disc
= new PhysicsRigidBody(discShape, PhysicsBody.massForStatic);
physicsSpace.addCollisionObject(disc);
disc.setPhysicsLocation(new Vector3f(0f, -3f, 0f));
// Re-position the camera for a better view.
cam.setLocation(new Vector3f(10f, -2.75f, 0f));
Vector3f targetLocation = new Vector3f(0f, -2.75f, 0f);
Vector3f upDirection = Vector3f.UNIT_Y;
cam.lookAt(targetLocation, upDirection);
}
public void meshLoad() {
// Set assetManager
assetManager.registerLocator("C:/", FileLocator.class);
assetManager.registerLocator("/", ClasspathLocator.class);
assetManager.registerLoader(STLLoader.class, "stl");
// Add a model to the scene.
long stl_beforeTime = System.currentTimeMillis();
Geometry geo = (Geometry) assetManager
.loadModel("conveyorBelt.stl");
Material mat = new Material(assetManager, "Common/MatDefs/Misc/ShowNormals.j3md");
long stl_afterTime = System.currentTimeMillis();
long stl_secDiffTime = (stl_afterTime - stl_beforeTime);
System.out.print("stl time : " + stl_secDiffTime + " (ms)\n");
// Add collision shape
long collision_beforeTime = System.currentTimeMillis();
HullCollisionShape shape = new HullCollisionShape(geo.getMesh());
RigidBodyControl control = new RigidBodyControl(shape, 1f);
long collision_afterTime = System.currentTimeMillis();
long collision_secDiffTime = (collision_afterTime - collision_beforeTime);
System.out.print("collision time : " + collision_secDiffTime + " (ms)\n");
geo.addControl(control);
control.setPhysicsLocation(new Vector3f(0f, 4f, 0f));
physicsSpace.add(geo);
geo.setMaterial(mat);
geo.scale(1f);
rootNode.attachChild(geo);
}
}
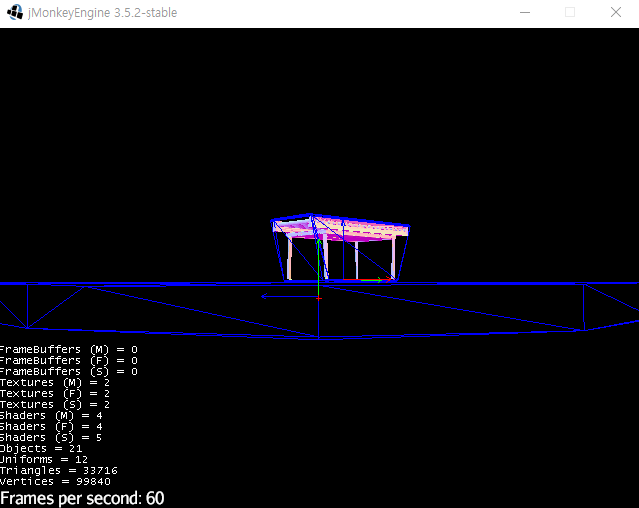
Results screen
Console
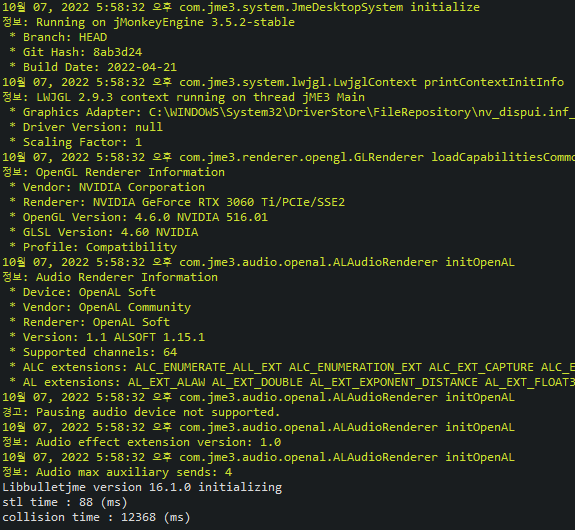
Time to load the stl file : 0.088s
Time to create conflict shapes for stl files : 12s