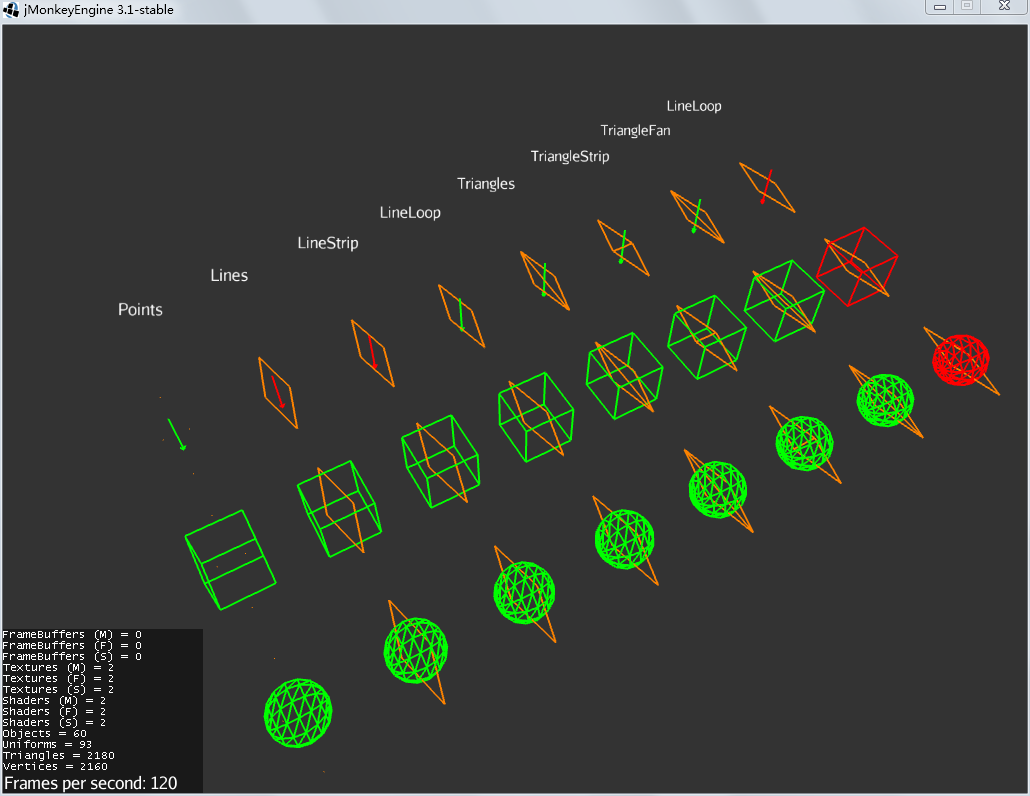
I made another testcase for this.
Screenshot:
Source code:
package net.jmecn.collision;
import com.jme3.app.SimpleApplication;
import com.jme3.bounding.BoundingBox;
import com.jme3.bounding.BoundingSphere;
import com.jme3.collision.Collidable;
import com.jme3.collision.CollisionResult;
import com.jme3.collision.CollisionResults;
import com.jme3.font.BitmapText;
import com.jme3.light.DirectionalLight;
import com.jme3.material.Material;
import com.jme3.math.ColorRGBA;
import com.jme3.math.Quaternion;
import com.jme3.math.Ray;
import com.jme3.math.Vector3f;
import com.jme3.scene.Geometry;
import com.jme3.scene.Mesh;
import com.jme3.scene.Mesh.Mode;
import com.jme3.scene.Node;
import com.jme3.scene.VertexBuffer.Type;
import com.jme3.scene.control.BillboardControl;
import com.jme3.scene.debug.Arrow;
import com.jme3.scene.debug.WireBox;
import com.jme3.scene.shape.Sphere;
/**
*
* @author yanmaoyuan
*
*/
public class TestMeshMode extends SimpleApplication {
float[] vertex = {
-2, 0, 0, // 0
0, 0, 0.5f, // 1
2, 0, 0, // 2
0, 0, -0.5f // 3
};
float[] normals = {
0, 1, 0,
0, 1, 0,
0, 1, 0,
0, 1, 0
};
int[] components = {1, 2, 2, 2, 3, 3, 3, 2};
short[][] indexes = {
{ 0, 1, 2, 3 }, // Points
{ 0, 1, 1, 2, 2, 3, 3, 0 }, // Lines
{ 0, 1, 2, 3, 0 }, // LineStrip
{ 0, 1, 1, 2, 2, 3, 3, 0 }, // LineLoop
{ 0, 1, 2, 0, 2, 3 }, // Triangles
{ 0, 1, 3, 2 }, // TriangleStrip
{ 0, 1, 2, 3 }, // TriangleFan
{ 0, 1, 1, 2, 2, 3}, // LineLoop NOTE: this one is supposed to throw IndexOutOfBoundsException
};
Mesh.Mode[] modes = {
Mode.Points,
Mode.Lines,
Mode.LineStrip,
Mode.LineLoop,
Mode.Triangles,
Mode.TriangleStrip,
Mode.TriangleFan,
Mode.LineLoop, // NOTE: this one is supposed to throw IndexOutOfBoundsException
Mode.Hybrid, // DONT USE, It is best to avoid using this mode as it may not be supported by all renderers.
Mode.Patch, // DONT USE, This mode is used for Tesselation only.
};
// Geometries with different mesh mode
Mesh[] meshes;
// Ray, BoundingBox, BoundingSphere
Collidable[] collidables;
private Arrow arrow;// for ray
private WireBox wirebox;// for bounding box
private Sphere sphere;// for bounding sphere
private Material matOrange;// for geometry
private Material matGreen;// when collision happens
private Material matRed;// when no collision happens
@Override
public void simpleInitApp() {
viewPort.setBackgroundColor(ColorRGBA.DarkGray);
// init camera
cam.setLocation(new Vector3f(23.49161f, 28.29185f, -1.0197717f));
cam.setRotation(new Quaternion(-0.22470495f, 0.77360606f, -0.3889088f, -0.44698012f));
flyCam.setMoveSpeed(10);
// materials
matOrange = unshadedMaterial(ColorRGBA.Orange);
matGreen = unshadedMaterial(ColorRGBA.Green);
matRed = unshadedMaterial(ColorRGBA.Red);
// Create collidables: Ray, BoundingBox, BoundingSphere
Ray ray = new Ray();
ray.setOrigin(new Vector3f(0, 1, 0));
ray.setDirection(new Vector3f(0, -1, 0));
ray.setLimit(2);
BoundingBox bb = new BoundingBox(new Vector3f(0, 0, 0), 1f, 1f, 1f);
BoundingSphere bs = new BoundingSphere(1f, new Vector3f(0, 0, 0));
collidables = new Collidable[] { ray, bb, bs };
// Create meshes for collidables
arrow = new Arrow(ray.direction.mult(ray.limit));
wirebox = new WireBox(1, 1, 1);
sphere = new Sphere(9, 12, 1);
// Create meshes for different mesh modes.
meshes = new Mesh[indexes.length];
for(int i=0; i<indexes.length; i++) {
short[] index = indexes[i];
Mesh.Mode mode = modes[i];
int component = components[i];
meshes[i] = makeMesh(index, mode, component);
}
// collide with each other
for (int x=0; x<meshes.length; x++) {
Mesh mesh = meshes[x];
String name = mesh.getMode().name();
System.out.printf("%s vs:\n", name);
// Display the Mesh mode
BitmapText text = guiFont.createLabel(name);
text.addControl(new BillboardControl());
text.scale(1/24f);
text.move(-8, 0, -x * 4);
rootNode.attachChild(text);
for (int y=0; y<collidables.length; y++) {
Collidable collidable = collidables[y];
System.out.printf("> %s:\n", collidable.getClass().getSimpleName());
// print collision results
boolean collision = collideWith(mesh, collidable);
// make visual part
Node node = makeScene(mesh, collidable, collision);
node.move(y * 6, 0, -x * 4);
rootNode.attachChild(node);
}
}
rootNode.addLight(new DirectionalLight(new Vector3f(0, -1, 0)));
}
/**
* Make meshes for different mesh modes.
* @param index
* @param mode
* @param component
* @return
*/
private Mesh makeMesh(short[] index, Mesh.Mode mode, int component) {
Mesh mesh = new Mesh();
mesh.setBuffer(Type.Position, 3, vertex);
mesh.setBuffer(Type.Normal, 3, normals);
mesh.setBuffer(Type.Index, component, index);
mesh.setMode(mode);
mesh.setStatic();
mesh.updateBound();
return mesh;
}
/**
* Print collision results
* @param mesh
* @param collidable
* @return
*/
private boolean collideWith(Mesh mesh, Collidable collidable) {
CollisionResults results = new CollisionResults();
try {
Geometry geom = new Geometry();
geom.setMesh(mesh);
geom.collideWith(collidable, results);
} catch (Exception e) {
e.printStackTrace(System.out);
}
// print collision results
if (results.size() > 0) {
for (CollisionResult result : results) {
System.out.printf(" - triangle=%d, distance=%.1f, contactPoint=%s contactNormal=%s\n",
result.getTriangleIndex(),
result.getDistance(),
result.getContactPoint(),
result.getContactNormal());
}
} else {
System.out.println(" - No collision.");
}
return results.size() > 0;
}
/**
* Make a unshaded material with given color.
* @param color
* @return
*/
private Material unshadedMaterial(ColorRGBA color) {
Material mat = new Material(assetManager, "Common/MatDefs/Misc/Unshaded.j3md");
mat.setColor("Color", color);
mat.getAdditionalRenderState().setLineWidth(2f);
mat.getAdditionalRenderState().setWireframe(true);
return mat;
}
/**
* Make the visual part for a Mesh and a Collidable.
* @param mesh
* @param collidable
* @param collision
* @return
*/
private Node makeScene(Mesh mesh, Collidable collidable, boolean collision) {
Node node = new Node();
// for Mesh
Geometry g = new Geometry();
g.setName(mesh.getMode().name());
g.setMesh(mesh);
g.setMaterial(matOrange);
node.attachChild(g);
// for Collidable
Geometry c = new Geometry();
if (collidable instanceof Ray) {
c.setMesh(arrow);
c.setName("ray");
c.setLocalTranslation(0, 1, 0);
} else if (collidable instanceof BoundingBox) {
c.setMesh(wirebox);
c.setName("bounding box");
} else if (collidable instanceof BoundingSphere) {
c.setMesh(sphere);
c.setName("bounding sphere");
}
// set different material, so we know which one has no collision.
if (collision) {
c.setMaterial(matGreen);
} else {
// no collision
c.setMaterial(matRed);
}
node.attachChild(c);
return node;
}
public static void main(String[] args) {
TestMeshMode app = new TestMeshMode();
app.start();
}
}
Output:
Points vs:
> Ray:
- triangle=0, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
> BoundingBox:
- triangle=0, distance=0.0, contactPoint=null contactNormal=null
> BoundingSphere:
- triangle=0, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
Lines vs:
> Ray:
- No collision.
> BoundingBox:
- triangle=0, distance=0.0, contactPoint=null contactNormal=null
- triangle=1, distance=0.0, contactPoint=null contactNormal=null
> BoundingSphere:
- triangle=0, distance=-0.5, contactPoint=(-0.11764705, 0.0, 0.47058824) contactNormal=(0.2425356, -0.0, -0.9701425)
- triangle=1, distance=-0.5, contactPoint=(0.11764705, 0.0, -0.47058824) contactNormal=(-0.2425356, -0.0, 0.9701425)
LineStrip vs:
> Ray:
- No collision.
> BoundingBox:
- triangle=0, distance=0.0, contactPoint=null contactNormal=null
- triangle=1, distance=0.0, contactPoint=null contactNormal=null
> BoundingSphere:
- triangle=0, distance=-0.5, contactPoint=(-0.11764705, 0.0, 0.47058824) contactNormal=(0.2425356, -0.0, -0.9701425)
- triangle=1, distance=-0.5, contactPoint=(0.11764705, 0.0, -0.47058824) contactNormal=(-0.2425356, -0.0, 0.9701425)
LineLoop vs:
> Ray:
- triangle=1, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
> BoundingBox:
- triangle=0, distance=0.0, contactPoint=null contactNormal=null
- triangle=1, distance=0.0, contactPoint=null contactNormal=null
- triangle=3, distance=0.0, contactPoint=null contactNormal=null
- triangle=4, distance=0.0, contactPoint=null contactNormal=null
> BoundingSphere:
- triangle=1, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
- triangle=0, distance=-0.5, contactPoint=(-0.11764705, 0.0, 0.47058824) contactNormal=(0.2425356, -0.0, -0.9701425)
- triangle=4, distance=-0.5, contactPoint=(-0.11764706, 0.0, -0.47058824) contactNormal=(0.24253562, -0.0, 0.9701425)
- triangle=3, distance=-0.5, contactPoint=(0.0, 0.0, -0.5) contactNormal=(-0.0, -0.0, 1.0)
Triangles vs:
> Ray:
- triangle=0, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
- triangle=1, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(-0.0, 1.0, 0.0)
> BoundingBox:
- triangle=0, distance=0.0, contactPoint=null contactNormal=null
- triangle=1, distance=0.0, contactPoint=null contactNormal=null
> BoundingSphere:
- triangle=0, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
- triangle=1, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(-0.0, 1.0, 0.0)
TriangleStrip vs:
> Ray:
- triangle=0, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(-0.0, 1.0, 0.0)
- triangle=1, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
> BoundingBox:
- triangle=0, distance=0.0, contactPoint=null contactNormal=null
- triangle=1, distance=0.0, contactPoint=null contactNormal=null
> BoundingSphere:
- triangle=0, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(-0.0, 1.0, 0.0)
- triangle=1, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
TriangleFan vs:
> Ray:
- triangle=0, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
- triangle=1, distance=1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(-0.0, 1.0, 0.0)
> BoundingBox:
- triangle=0, distance=0.0, contactPoint=null contactNormal=null
- triangle=1, distance=0.0, contactPoint=null contactNormal=null
> BoundingSphere:
- triangle=0, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(0.0, 1.0, 0.0)
- triangle=1, distance=-1.0, contactPoint=(0.0, 0.0, 0.0) contactNormal=(-0.0, 1.0, 0.0)
LineLoop vs:
> Ray:
java.lang.IndexOutOfBoundsException
at java.nio.Buffer.checkIndex(Buffer.java:540)
at java.nio.DirectShortBufferU.get(DirectShortBufferU.java:253)
at com.jme3.scene.mesh.IndexShortBuffer.get(IndexShortBuffer.java:53)
at com.jme3.scene.mesh.WrappedIndexBuffer.get(WrappedIndexBuffer.java:80)
at com.jme3.collision.bih.BIHTree.initTriList(BIHTree.java:96)
at com.jme3.collision.bih.BIHTree.<init>(BIHTree.java:135)
at com.jme3.collision.bih.BIHTree.<init>(BIHTree.java:139)
at com.jme3.scene.Mesh.createCollisionData(Mesh.java:966)
at com.jme3.scene.Mesh.collideWith(Mesh.java:995)
at com.jme3.scene.Geometry.collideWith(Geometry.java:450)
at net.jmecn.collision.TestMeshMode.collideWith(TestMeshMode.java:189)
at net.jmecn.collision.TestMeshMode.simpleInitApp(TestMeshMode.java:143)
at com.jme3.app.SimpleApplication.initialize(SimpleApplication.java:220)
at com.jme3.system.lwjgl.LwjglAbstractDisplay.initInThread(LwjglAbstractDisplay.java:130)
at com.jme3.system.lwjgl.LwjglAbstractDisplay.run(LwjglAbstractDisplay.java:211)
at java.lang.Thread.run(Thread.java:745)
- No collision.
> BoundingBox:
java.lang.IndexOutOfBoundsException
at java.nio.Buffer.checkIndex(Buffer.java:540)
at java.nio.DirectShortBufferU.get(DirectShortBufferU.java:253)
at com.jme3.scene.mesh.IndexShortBuffer.get(IndexShortBuffer.java:53)
at com.jme3.scene.mesh.WrappedIndexBuffer.get(WrappedIndexBuffer.java:80)
at com.jme3.collision.bih.BIHTree.initTriList(BIHTree.java:96)
at com.jme3.collision.bih.BIHTree.<init>(BIHTree.java:135)
at com.jme3.collision.bih.BIHTree.<init>(BIHTree.java:139)
at com.jme3.scene.Mesh.createCollisionData(Mesh.java:966)
at com.jme3.scene.Mesh.collideWith(Mesh.java:995)
at com.jme3.scene.Geometry.collideWith(Geometry.java:450)
at net.jmecn.collision.TestMeshMode.collideWith(TestMeshMode.java:189)
at net.jmecn.collision.TestMeshMode.simpleInitApp(TestMeshMode.java:143)
at com.jme3.app.SimpleApplication.initialize(SimpleApplication.java:220)
at com.jme3.system.lwjgl.LwjglAbstractDisplay.initInThread(LwjglAbstractDisplay.java:130)
at com.jme3.system.lwjgl.LwjglAbstractDisplay.run(LwjglAbstractDisplay.java:211)
at java.lang.Thread.run(Thread.java:745)
- No collision.
> BoundingSphere:
java.lang.IndexOutOfBoundsException
at java.nio.Buffer.checkIndex(Buffer.java:540)
at java.nio.DirectShortBufferU.get(DirectShortBufferU.java:253)
at com.jme3.scene.mesh.IndexShortBuffer.get(IndexShortBuffer.java:53)
at com.jme3.scene.mesh.WrappedIndexBuffer.get(WrappedIndexBuffer.java:80)
at com.jme3.collision.bih.BIHTree.initTriList(BIHTree.java:96)
at com.jme3.collision.bih.BIHTree.<init>(BIHTree.java:135)
at com.jme3.collision.bih.BIHTree.<init>(BIHTree.java:139)
at com.jme3.scene.Mesh.createCollisionData(Mesh.java:966)
at com.jme3.scene.Mesh.collideWith(Mesh.java:995)
at com.jme3.scene.Geometry.collideWith(Geometry.java:450)
at net.jmecn.collision.TestMeshMode.collideWith(TestMeshMode.java:189)
at net.jmecn.collision.TestMeshMode.simpleInitApp(TestMeshMode.java:143)
at com.jme3.app.SimpleApplication.initialize(SimpleApplication.java:220)
at com.jme3.system.lwjgl.LwjglAbstractDisplay.initInThread(LwjglAbstractDisplay.java:130)
at com.jme3.system.lwjgl.LwjglAbstractDisplay.run(LwjglAbstractDisplay.java:211)
at java.lang.Thread.run(Thread.java:745)
- No collision.