Found some time to play around with your test.
I modified it to use root motion.
Here is the idea:
I converted the original climbing animation to an in-place animation by removing translations from the hips track
hipsTrack = MyAnimation.findJointTrack(climbing, hips.getId());
AnimTrack[] tracks = climbing.getTracks();
for (int i = 0; i < tracks.length; i++) {
if(tracks[i] == hipsTrack) {
// Convert it to an in-place animation by removing translations data
tracks[i] = new TransformTrack(hipsTrack.getTarget(), hipsTrack.getTimes(), null, hipsTrack.getRotations(), hipsTrack.getScales());
}
}
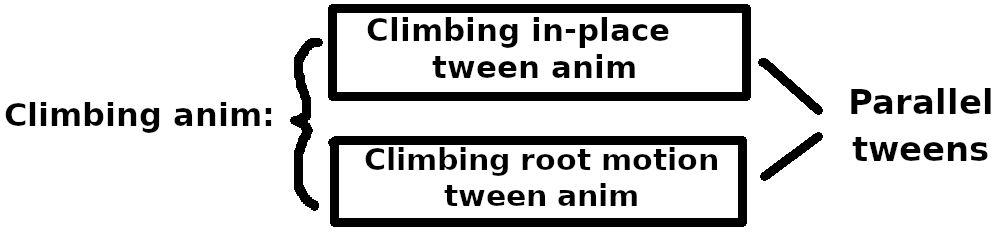
then created a new spatial animation track by those translations and set the player node as its target.
Then combined these two animations in a parallel tween and add it to AnimComposer.
// Create a root motion track for player node
TransformTrack climbingRootMotionTrack = new TransformTrack(player, hipsTrack.getTimes(), translations, null, null);
animComposer.addAction(AnimDefs.Climbing, new BaseAction(
Tweens.parallel(animComposer.getAction(AnimDefs.Climbing), new RootMotion(climbingRootMotionTrack))));
Also because the model origin and hips origin were not coinciding, I needed to translate root motion animation data back to the model origin (0, 0, 0).
Vector3f[] translations = hipsTrack.getTranslations();
for (Vector3f translation : translations) {
// Because model is scaled by 0.01 we must scale animation data by 0.01 as well!
translation.multLocal(0.01f);
// Because hip origin(0.0, 0.99, 0.002) and model origin(0, 0, 0) is not coincide,
// we must translate it back to model origin
translation.subtractLocal(hipsOrigin);
}
At its core, RootMotion is a tween that runs in parallel with its counterpart in-place action.
private static class RootMotion implements Tween {
private final TransformTrack track;
private final Spatial spatial;
private final Transform transform = new Transform();
private Vector3f startLoc;
public RootMotion(TransformTrack track) {
this.track = track;
if(!(track.getTarget() instanceof Spatial)) {
throw new IllegalArgumentException("Target of root motion track must be a spatial.");
}
this.spatial = (Spatial) track.getTarget();
}
@Override
public double getLength() {
return track.getLength();
}
@Override
public boolean interpolate(double t) {
if (t > getLength()) {
startLoc = null;
return false;
}
if (startLoc == null) {
startLoc = spatial.getLocalTranslation().clone();
}
track.getDataAtTime(t, transform);
Vector3f newLocation = startLoc.add(transform.getTranslation());
spatial.setLocalTranslation(newLocation);
return true;
}
}
here is the full example:
package com.capdevon.demo;
import com.capdevon.animation.MixamoBodyBones;
import com.capdevon.control.AdapterControl;
import com.capdevon.debug.DebugShape;
import com.capdevon.engine.FVector;
import com.capdevon.physx.Physics;
import com.capdevon.physx.PhysxDebugAppState;
import com.capdevon.physx.RaycastHit;
import com.jme3.anim.*;
import com.jme3.anim.tween.Tween;
import com.jme3.anim.tween.Tweens;
import com.jme3.anim.tween.action.Action;
import com.jme3.anim.tween.action.BaseAction;
import com.jme3.anim.tween.action.ClipAction;
import com.jme3.app.Application;
import com.jme3.app.FlyCamAppState;
import com.jme3.app.SimpleApplication;
import com.jme3.bullet.BulletAppState;
import com.jme3.bullet.collision.shapes.CollisionShape;
import com.jme3.bullet.control.BetterCharacterControl;
import com.jme3.bullet.control.RigidBodyControl;
import com.jme3.bullet.debug.DebugTools;
import com.jme3.bullet.util.CollisionShapeFactory;
import com.jme3.input.ChaseCamera;
import com.jme3.input.InputManager;
import com.jme3.input.KeyInput;
import com.jme3.input.controls.ActionListener;
import com.jme3.input.controls.KeyTrigger;
import com.jme3.input.controls.Trigger;
import com.jme3.light.AmbientLight;
import com.jme3.light.DirectionalLight;
import com.jme3.math.ColorRGBA;
import com.jme3.math.FastMath;
import com.jme3.math.Quaternion;
import com.jme3.math.Ray;
import com.jme3.math.Transform;
import com.jme3.math.Vector3f;
import com.jme3.post.FilterPostProcessor;
import com.jme3.renderer.Camera;
import com.jme3.renderer.RenderManager;
import com.jme3.renderer.ViewPort;
import com.jme3.renderer.queue.RenderQueue;
import com.jme3.scene.Geometry;
import com.jme3.scene.Node;
import com.jme3.scene.Spatial;
import com.jme3.shadow.DirectionalLightShadowFilter;
import com.jme3.system.AppSettings;
import com.jme3.util.SkyFactory;
import jme3utilities.MyAnimation;
/**
* @author capdevon
*/
public class Test_Climbing extends SimpleApplication {
/**
* @param args
*/
public static void main(String[] args) {
Test_Climbing app = new Test_Climbing();
AppSettings settings = new AppSettings(true);
settings.setUseJoysticks(true);
settings.setResolution(1280, 720);
settings.setFrequency(60);
settings.setFrameRate(200);
settings.setSamples(4);
settings.setBitsPerPixel(32);
settings.setVSync(false);
app.setSettings(settings);
app.setShowSettings(false);
app.setPauseOnLostFocus(false);
app.start();
}
private BulletAppState physics;
private Node scene;
private Node player;
private final String CHARACTER_MODEL = "Models/Climbing/climbing-export.gltf";
private final String SCENE_MODEL = "Models/Climbing/scene.j3o";
@Override
public void simpleInitApp() {
viewPort.setBackgroundColor(new ColorRGBA(0.5f, 0.6f, 0.7f, 1.0f));
rootNode.setShadowMode(RenderQueue.ShadowMode.CastAndReceive);
initPhysics();
// setupSky();
setupScene();
setupPlayer();
setupLights();
}
private void initPhysics() {
physics = new BulletAppState();
//physics.setThreadingType(ThreadingType.SEQUENTIAL);
stateManager.attach(physics);
physics.setDebugAxisLength(1);
physics.setDebugEnabled(true);
// press 0 to toggle physics debug
stateManager.attach(new PhysxDebugAppState());
}
/**
* a sky as background
*/
private void setupSky() {
Spatial sky = SkyFactory.createSky(assetManager, "Scenes/Beach/FullskiesSunset0068.dds", SkyFactory.EnvMapType.CubeMap);
sky.setShadowMode(RenderQueue.ShadowMode.Off);
rootNode.attachChild(sky);
}
private void setupScene() {
scene = (Node) assetManager.loadModel(SCENE_MODEL);
rootNode.attachChild(scene);
CollisionShape shape = CollisionShapeFactory.createMeshShape(scene);
RigidBodyControl rgb = new RigidBodyControl(shape, 0f);
scene.addControl(rgb);
physics.getPhysicsSpace().add(rgb);
}
private void setupLights() {
AmbientLight ambient = new AmbientLight();
ambient.setColor(ColorRGBA.White.clone());
rootNode.addLight(ambient);
ambient.setName("ambient");
DirectionalLight sun = new DirectionalLight();
sun.setDirection(new Vector3f(-0.5f, -0.5f, 0.5f).normalizeLocal());
sun.setColor(ColorRGBA.White.clone());
rootNode.addLight(sun);
sun.setName("sun");
FilterPostProcessor fpp = new FilterPostProcessor(assetManager);
viewPort.addProcessor(fpp);
DirectionalLightShadowFilter shadowFilter = new DirectionalLightShadowFilter(assetManager, 2_048, 3);
shadowFilter.setLight(sun);
shadowFilter.setShadowIntensity(0.4f);
shadowFilter.setShadowZExtend(256);
fpp.addFilter(shadowFilter);
}
private void setupPlayer() {
DebugShape debugShape = new DebugShape(assetManager);
//
player = new Node("MainCharacter");
player.attachChild(debugShape.getAxisCoordinate());
player.setLocalTranslation(0, 1, -1);
rootNode.attachChild(player);
// vertical
Node ledgeRayV = new Node("LedgeRayV");
ledgeRayV.attachChild(debugShape.createWireBox(0.1f, ColorRGBA.Red));
player.attachChild(ledgeRayV);
ledgeRayV.setLocalTranslation(FVector.forward(player).multLocal(0.5f).addLocal(0, 3, 0));
// horizontal
Node ledgeRayH = new Node("LedgeRayH");
ledgeRayH.attachChild(debugShape.createWireBox(0.1f, ColorRGBA.Blue));
player.attachChild(ledgeRayH);
ledgeRayH.setLocalTranslation(FVector.forward(player).multLocal(0.2f).addLocal(0, 1.5f, 0));
// setup model
Spatial model = assetManager.loadModel(CHARACTER_MODEL);
model.setName("Character.Model");
player.attachChild(model);
// setup physics character
BetterCharacterControl bcc = new BetterCharacterControl(.4f, 1.8f, 40f);
player.addControl(bcc);
physics.getPhysicsSpace().add(bcc);
// setup third person camera
setupChaseCamera();
Geometry rootBoneRef = debugShape.createWireSphere(0.4f, ColorRGBA.White);
rootNode.attachChild(rootBoneRef);
// setup player control
PlayerControl pControl = new PlayerControl(this);
pControl.ledgeRayH = ledgeRayH;
pControl.ledgeRayV = ledgeRayV;
pControl.model = model;
pControl.rootBoneRef = rootBoneRef;
player.addControl(pControl);
}
private void setupChaseCamera() {
// disable the default 1st-person flyCam!
stateManager.detach(stateManager.getState(FlyCamAppState.class));
flyCam.setEnabled(false);
ChaseCamera chaseCam = new ChaseCamera(cam, player, inputManager);
chaseCam.setUpVector(Vector3f.UNIT_Y.clone());
chaseCam.setLookAtOffset(new Vector3f(0f, 1f, 0f));
chaseCam.setMaxDistance(8f);
chaseCam.setMinDistance(5f);
chaseCam.setDefaultDistance(chaseCam.getMaxDistance());
chaseCam.setMaxVerticalRotation(FastMath.QUARTER_PI);
chaseCam.setMinVerticalRotation(-FastMath.QUARTER_PI);
chaseCam.setRotationSpeed(2f);
chaseCam.setRotationSensitivity(1.5f);
chaseCam.setZoomSensitivity(4f);
chaseCam.setDownRotateOnCloseViewOnly(false);
}
private interface AnimDefs {
final String Idle = "Idle";
final String Running = "Running";
final String Running_2 = "Running_1";
final String SneakingForward = "SneakingForward";
final String Climbing = "Climbing";
final String CrouchedToStanding = "CrouchedToStanding";
final String RightShimmy = "RightShimmy";
final String LeftShimmy = "LeftShimmy";
final String HangingIdle = "HangingIdle";
final String HangingIdle_1 = "HangingIdle_1";
final String ClimbingUpWall = "ClimbingUpWall";
final String FreeHangToBraced = "FreeHangToBraced";
}
/**
* ---------------------------------------------------------
* @class PlayerControl
* ---------------------------------------------------------
*/
private class PlayerControl extends AdapterControl implements ActionListener {
public Node ledgeRayV;
public Node ledgeRayH;
public Spatial model;
public Geometry rootBoneRef;
Camera camera;
DebugTools debugTools;
InputManager inputManager;
AnimComposer animComposer;
BetterCharacterControl bcc;
private final Vector3f walkDirection = new Vector3f(0, 0, 0);
private final Vector3f viewDirection = new Vector3f(0, 0, 1);
private final Vector3f camDir = new Vector3f();
private final Vector3f camLeft = new Vector3f();
private final Quaternion lookRotation = new Quaternion();
private final RaycastHit hitInfo = new RaycastHit();
float m_MoveSpeed = 4.5f;
float m_TurnSpeed = 10f;
boolean _MoveForward, _MoveBackward, _MoveLeft, _MoveRight;
boolean isClimbingMode, startClimb;
boolean isClimbingAnimDone = true;
TransformTrack hipsTrack;
Transform rootMotion = new Transform();
/**
* Constructor.
*
* @param app
*/
public PlayerControl(Application app) {
this.camera = app.getCamera();
this.debugTools = new DebugTools(app.getAssetManager());
registerWithInput(app.getInputManager());
}
@Override
public void setSpatial(Spatial sp) {
super.setSpatial(sp);
if (spatial != null) {
this.bcc = getComponent(BetterCharacterControl.class);
this.animComposer = getComponentInChild(AnimComposer.class);
// setup animations
animComposer.getAnimClipsNames().forEach(animName -> animComposer.action(animName));
String animName = AnimDefs.Climbing;
Action action = animComposer.getAction(animName);
action = new BaseAction(Tweens.sequence(action, Tweens.callMethod(this, "onClimbingDone")));
animComposer.addAction(animName, action);
SkinningControl skeleton = getComponentInChild(SkinningControl.class);
skeleton.getArmature().applyBindPose();
Joint hips = skeleton.getArmature().getJoint("Armature_mixamorig:" + MixamoBodyBones.Hips);
Vector3f hipsOrigin = hips.getModelTransform().getTranslation().clone();
// Because model is scaled by 0.01 we must scale joint location by 0.01 as well!
hipsOrigin.multLocal(0.01f);
AnimClip climbing = animComposer.getAnimClip(AnimDefs.Climbing);
hipsTrack = MyAnimation.findJointTrack(climbing, hips.getId());
AnimTrack[] tracks = climbing.getTracks();
for (int i = 0; i < tracks.length; i++) {
if(tracks[i] == hipsTrack) {
// Convert it to an in-place animation by removing translations data
tracks[i] = new TransformTrack(hipsTrack.getTarget(), hipsTrack.getTimes(), null, hipsTrack.getRotations(), hipsTrack.getScales());
}
}
Vector3f[] translations = hipsTrack.getTranslations();
for (Vector3f translation : translations) {
// Because model is scaled by 0.01 we must scale animation data by 0.01 as well!
translation.multLocal(0.01f);
// Because hip origin(0.0, 0.99, 0.002) and model origin(0, 0, 0) is not coincide,
// we must translate it back to model origin
translation.subtractLocal(hipsOrigin);
}
// Create a root motion track for player node
TransformTrack climbingRootMotionTrack = new TransformTrack(player, hipsTrack.getTimes(), translations, null, null);
animComposer.addAction(AnimDefs.Climbing, new BaseAction(
Tweens.parallel(animComposer.getAction(AnimDefs.Climbing), new RootMotion(climbingRootMotionTrack))));
}
}
@Override
public void onAction(String name, boolean isPressed, float tpf) {
if (name.equals(InputMapping.MOVE_LEFT)) {
_MoveLeft = isPressed;
} else if (name.equals(InputMapping.MOVE_RIGHT)) {
_MoveRight = isPressed;
} else if (name.equals(InputMapping.MOVE_FORWARD)) {
_MoveForward = isPressed;
} else if (name.equals(InputMapping.MOVE_BACKWARD)) {
_MoveBackward = isPressed;
} else if (name.equals(InputMapping.ACTION) && isPressed && isClimbingAnimDone) {
checkLedgeGrab();
}
}
@Override
protected void controlUpdate(float tpf) {
if (!isClimbingMode) {
// Player is in NORMAL state
updateMovement(tpf);
} else {
// Player is in CLIMBING state
if (startClimb && !isClimbingAnimDone) {
// align with wall
//spatial.getWorldRotation().slerp(helper.getRotation(), tpf * 5);
hipsTrack.getDataAtTime(animComposer.getTime(), rootMotion);
Vector3f vec = animComposer.getSpatial().localToWorld(rootMotion.getTranslation(), null);
rootBoneRef.setLocalTranslation(vec);
rootBoneRef.setLocalRotation(rootMotion.getRotation());
} else if (isClimbingAnimDone) {
isClimbingMode = false;
startClimb = false;
//spatial.setLocalTranslation(goalPosition);
//bcc.setEnabled(true);
bcc.warp(goalPosition);
}
}
}
float hDistAwayFromLedge = 0.1f;
float vDistAwayFromLedge = 0.1f;
Transform helper = new Transform();
Vector3f goalPosition = new Vector3f();
private void checkLedgeGrab() {
if (!isClimbingMode && bcc.isOnGround()) {
Ray vRay = new Ray(ledgeRayV.getWorldTranslation(), Vector3f.UNIT_Y.negate());
debugTools.setRedArrow(vRay.getOrigin(), vRay.getDirection());
if (Physics.Raycast(vRay, hitInfo, 2)) {
System.out.println(hitInfo);
Vector3f hRayPosition = ledgeRayH.getWorldTranslation().clone();
hRayPosition.setY(hitInfo.point.y - 0.01f);
Ray hRay = new Ray(hRayPosition, ledgeRayH.getWorldRotation().mult(Vector3f.UNIT_Z));
debugTools.setBlueArrow(hRay.getOrigin(), hRay.getDirection());
if (Physics.Raycast(hRay, hitInfo, 2)) {
System.out.println(hitInfo);
debugTools.setPinkArrow(hitInfo.point, hitInfo.normal);
goalPosition.set(hitInfo.point.add(0, 0.01f, 0));
bcc.setViewDirection(hitInfo.normal.negate()); // align with wall
bcc.setWalkDirection(Vector3f.ZERO); // stop walking
//bcc.setEnabled(false);
//helper.setTranslation(hitInfo.normal.negate().multLocal(hDistAwayFromLedge).addLocal(spatial.getWorldTranslation()));
//helper.getTranslation().setY(hitInfo.point.y - vDistAwayFromLedge);
//helper.setRotation(FRotator.lookRotation(hitInfo.normal.negate()));
setAnimation(AnimDefs.Climbing);
isClimbingMode = true;
startClimb = true;
isClimbingAnimDone = false;
System.out.println("startClimbing");
}
}
} else {
isClimbingMode = false;
//bcc.setEnabled(true);
}
}
void onClimbingDone() {
isClimbingAnimDone = true;
System.out.println("climbingDone");
}
private void updateMovement(float tpf) {
camera.getDirection(camDir).setY(0);
camera.getLeft(camLeft).setY(0);
walkDirection.set(0, 0, 0);
if (_MoveForward) {
walkDirection.addLocal(camDir);
} else if (_MoveBackward) {
walkDirection.addLocal(camDir.negateLocal());
}
if (_MoveLeft) {
walkDirection.addLocal(camLeft);
} else if (_MoveRight) {
walkDirection.addLocal(camLeft.negateLocal());
}
walkDirection.normalizeLocal();
boolean isMoving = walkDirection.lengthSquared() > 0;
if (isMoving) {
float angle = FastMath.atan2(walkDirection.x, walkDirection.z);
lookRotation.fromAngleNormalAxis(angle, Vector3f.UNIT_Y);
spatial.getWorldRotation().slerp(lookRotation, m_TurnSpeed * tpf);
spatial.getWorldRotation().mult(Vector3f.UNIT_Z, viewDirection);
bcc.setViewDirection(viewDirection);
}
bcc.setWalkDirection(walkDirection.multLocal(m_MoveSpeed));
setAnimation(isMoving ? AnimDefs.Running : AnimDefs.Idle);
}
private void setAnimation(String animName) {
if (animComposer.getCurrentAction() != animComposer.getAction(animName)) {
animComposer.setCurrentAction(animName);
}
}
private void stopMove() {
_MoveForward = false;
_MoveBackward = false;
_MoveLeft = false;
_MoveRight = false;
}
@Override
protected void controlRender(RenderManager rm, ViewPort vp) {
if (debugTools != null) {
debugTools.show(rm, vp);
}
}
/**
* Custom Keybinding: Map named actions to inputs.
*/
private void registerWithInput(InputManager inputManager) {
this.inputManager = inputManager;
addMapping(InputMapping.MOVE_FORWARD, new KeyTrigger(KeyInput.KEY_W));
addMapping(InputMapping.MOVE_BACKWARD, new KeyTrigger(KeyInput.KEY_S));
addMapping(InputMapping.MOVE_LEFT, new KeyTrigger(KeyInput.KEY_A));
addMapping(InputMapping.MOVE_RIGHT, new KeyTrigger(KeyInput.KEY_D));
addMapping(InputMapping.ACTION, new KeyTrigger(KeyInput.KEY_SPACE));
}
private void addMapping(String mapping, Trigger... triggers) {
inputManager.addMapping(mapping, triggers);
inputManager.addListener(this, mapping);
}
}
private interface InputMapping {
final String MOVE_LEFT = "MOVE_LEFT";
final String MOVE_RIGHT = "MOVE_RIGHT";
final String MOVE_FORWARD = "MOVE_FORWARD";
final String MOVE_BACKWARD = "MOVE_BACKWARD";
final String ACTION = "ACTION";
}
private static class RootMotion implements Tween {
private final TransformTrack track;
private final Spatial spatial;
private final Transform transform = new Transform();
private Vector3f startLoc;
public RootMotion(TransformTrack track) {
this.track = track;
if(!(track.getTarget() instanceof Spatial)) {
throw new IllegalArgumentException("Target of root motion track must be a spatial.");
}
this.spatial = (Spatial) track.getTarget();
}
@Override
public double getLength() {
return track.getLength();
}
@Override
public boolean interpolate(double t) {
if (t > getLength()) {
startLoc = null;
return false;
}
if (startLoc == null) {
startLoc = spatial.getLocalTranslation().clone();
}
track.getDataAtTime(t, transform);
Vector3f newLocation = startLoc.add(transform.getTranslation());
spatial.setLocalTranslation(newLocation);
return true;
}
}
}
Feel free to ask if you have a question.
Regards