P.S: It uses a Navigation Mesh (which is generated from a mesh) to find path.
Does navmesh generating costful?
I have world that generates dynamicly with dynamic constructions (so I don’t know how scene will look like). Is it good idea to use navmesh in this way?
As I said I am using blender to generate navmesh from my terrain in blender (In my case my navmesh actually is a very low polygon version of my terrain mesh which is generated using blender decimate modifier) and it is created in mater of seconds. Then in jme ai i generate navmesh from mesh. [this happens in another thread so has no impact on my main game loop]
NavMesh navMesh = new NavMesh();
navMesh.loadFromMesh(mesh);
because mesh is low poly so generating NavMesh is very fast.
You are generating your terrain dynamically ? How ? Are you generating heightmap dynamically ?
If so then it is complicate and I have no idea
(You can generate navmesh using jme navmesh generator dynamically in this case instead of using blender)
If your construction itself is static (means they are not moving after you placed them on terrain) but placing them on terrain is dynamic (means when your game is loading the scene, it dynamically places your construction) but after placing them they should not move anymore in game playing.
If so then you can edit navmesh dynamically when loading scene. (i found this idea yesterday )
but if by dynamic constructions you means your constructions can freely move in game (even after scene is created), then as @Darkchaos said it is more about Steering Behaviors and dynamical obstacle avoidance than generating/editing navmesh, I suppose.
Not sure about this. But for avoiding it can calculate another path. As BigBob said. And our pathfinder is obstacle safe (because we already removed triangles/cells where there is static obstacles from our navmesh)
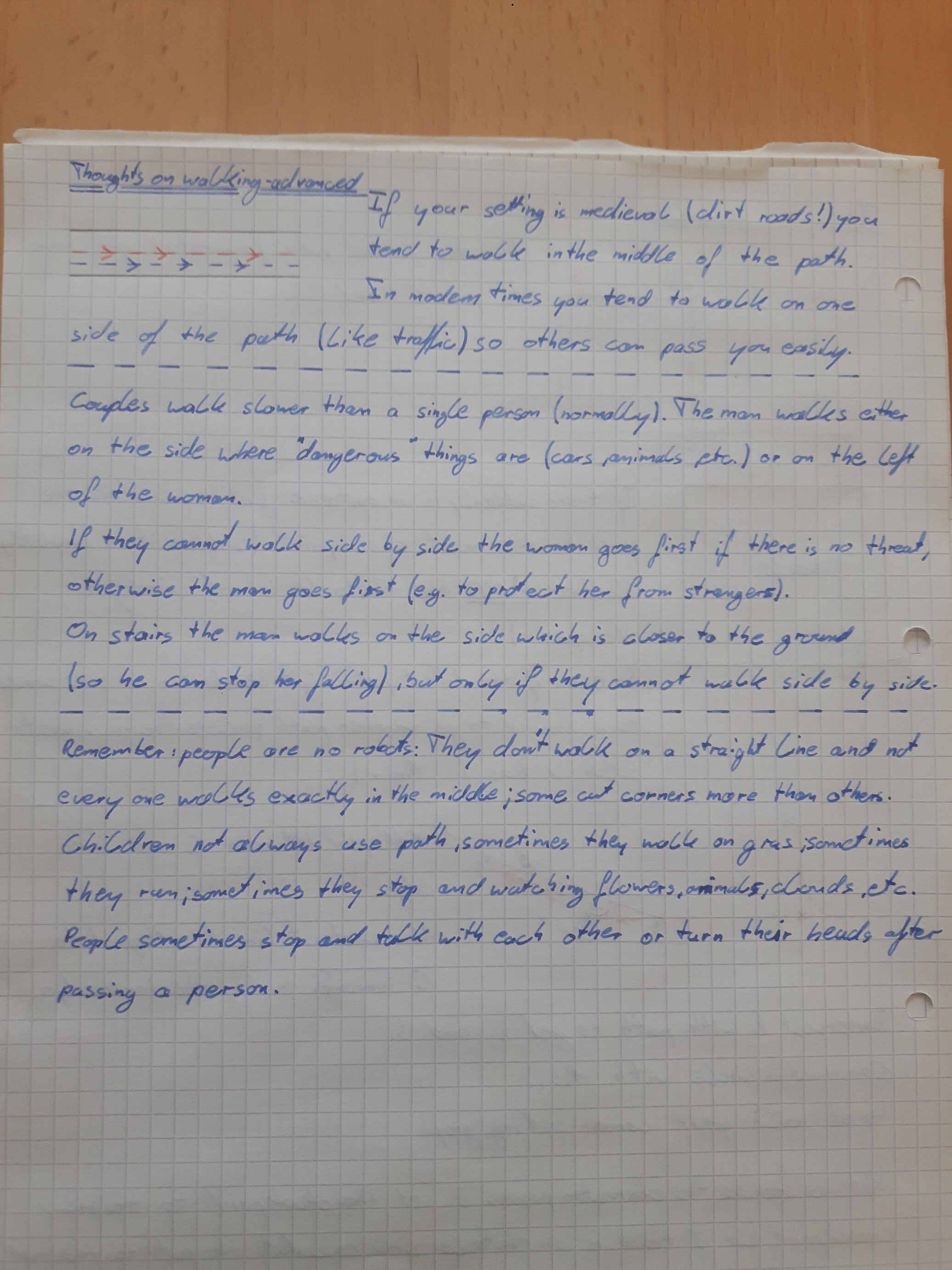
Imagine a City. You want to walk through the whole city.
You’ll first start the navmesh-pathfinding and throw that path at a path-follow behavior (to smooth the movement) along with an avoidance behavior.
Now due to the smoothening, what happens when the npc is stuck at a corner (since that curve is simply not walkable)?
I would need a steering behavior to check this, though it doesn’t do a lookahead (Only taking the curve when you’re not stuck the whole curve)
Another case would be trying to avoid a collission with another npc and bugging into a street-lantern.
I know that those are rare cases and some simply anti-stuck mechanism could bypass this, but maybe someone knows a nice way to do it right?
When you now consider generating a navmesh-path for every frame (and hence steering movement), you have multiple problems:
When there is no obstacle, it simply costs cpu power.
When there is an obstacle, it either takes a long detour to reach the spot or we cannot generate a path.
Also you have problems like walking up a hill then, since the steering behavior doesn’t consider the Y-Direction and thus the navmesh would always say “not reachable”.
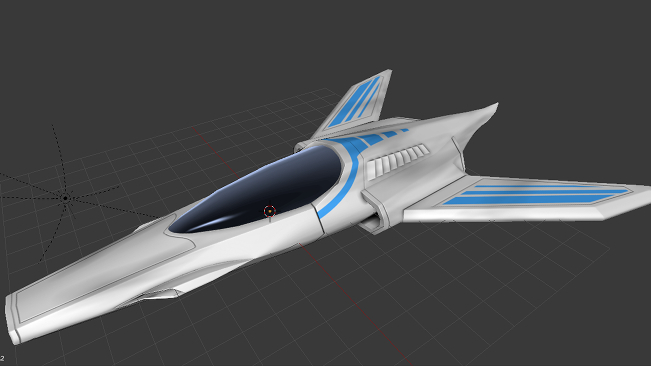
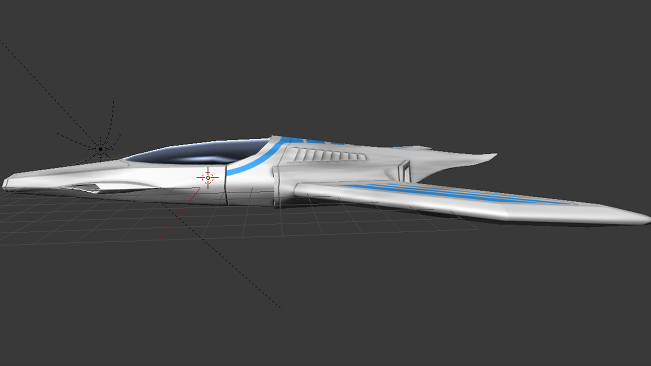
Not that big a deal… I started reskinning the ship used in my SimEthereal examples. It’s not done yet but it’s getting to look like something:
Except the part that IS a big deal is that this image was taken from the version that’s been converted to use Zay-ES. (yay) That’s why there is no player label over the ship… I can now do that as a separate visual system and haven’t written it yet.
…way more flexible.
I had to reskin it because I want to be able to support player-defined colors so I’m separating the livery coloring into a separate layer. (Edit: plus the other one was pixel-art style… and that doesn’t really fit the background or direction I’m heading.)
Why should your navmesh not support the y-direction.
And do you really walk curves; I mean you are not a car, the curves would be very small.
You could just say you start 1m before you reach the next point you start a curve which ends at 1m after this point, but you have to check if you can walk this without collision off course.
For the collision thing with other NPCs how do you do it in real life. Normally both persons go to the right side so that they can pass without a collision.
And I would update only the path between me and the next checkpoint if there is a obstacle between
This is from my management game, inspired by Speedball. Matches arn’t ment to be watched often, it’s rendered onto a texture that is part of the UI sort of going on in the background - can be skipped or sped up. It’s only useful when you want to examine your team tactic. The texture is 360x270 with Nearest filter for magnification so it has a pixely look to go with the UI.
The lines are a kind of old TV effect, the part of the UI with the matches on will be like a TV with buttons to control it.
This is it max size without youtube even further reducing the quality since I couldn’t get it to accept higher quality video.
One question though, is it also supposed to be atmospheric? Because without a vertical stabilizer you’re gonna have a bad time. Or are those wings there because of the rule of cool?